- Untuk mengatur hidup dan mati exhaust pan dan kipas angin terhadap suhu
- Untuk mengetahui cara menghubungkan sensor DHT 22 dengan uC Arduino






Resistor atau hambatan yaitu salah satu komponen elektronika yang punya nilai hambatan tertentu, dimana hambatan ini akan menghambat arus listrik yang mengalir melaluinya. Sebuah resistor biasanya terbuat dari bahan campuran Carbon. Tapi tidak sedikit juga resistor yang terbuat dari kawat nikrom, sebuah kawat yang punya resistansi yang cukup tinggi dan tahan pada arus kuat. Contohnya, penggunaan kawat nikrom bisa dilihat pada elemen pemanas setrika. Jika elemen pemanas tersebut dibuka, maka ada seutas kawat spiral yang biasa disebut dengan kawat nikrom.
Satuan Resistor yaiti Ohm (Ω) yang merupakan satuan SI buat Resistansi listrik.
Fungsi Resistor
Ada beberapa fungsi dari Resistor yang harus kamu ketahui, yaitu:
~ Fungsi resistor yaitu buat membatasi arus listrik yang mengalir.
~ Fungsi resistor buat aplikasi DC yang membutuhkan keakuratan yang sangat tinggi. Contoh, aplikasi penggunaan resistor ini yaitu DC Measuring equipment, dan reference gulators buat voltage regulator dan decoding Network.
~ Fungsi resistor sebagai standart didalam verifikasi keakuratan dari suatu alat ukur resistive.
~ Fungsi resistor buat pengatur tegangan output pada power supplay.
~ Fungsi resistor buat aplikasi power, karena membutuhkan frekuensi respon yang baik, daya yang tinggi dan nilai yang lebih besar dari pada power wirewound resistor.
~ Fungsi resistor pembagi tegangan.
Karakteristik Resistor
Ada beberapa karakteristik utama pada sebuah resistor, yaitu sebagai berikut:
~ Resistansi terhadap daya listrik yang dapat boros
~ Koefisien suhu, desah listrik, dan induktansi
~ Resistor bersifat resistif
~ Terbuat dari bahan karbon


Spesifikasi sensor suhu kelembaban DHT22 :
- Tegangan input : 3,3 – 6 VDC
- Sistem komunikasi : Serial (single – Wire Two way)
- Range suhu : -400C – 800C
- Range kelembaban : 0% – 100% RH
- Akurasi : ±20C (temperature) ±5% RH (humidity)
Untuk urusan kaki/pin, sensor suhu dan kelembaban DHT22 terdiri dari 4 kaki/pin, sama dengan DHT11, tetapi yang dipakai hanya 3 pin saja. Biasanya kalau kita membeli dalam bentuk modul jumlah pin-nya menjadi 3 :
- VCC(+) : tegangan input (5V)
- GND(-) : Ground
- Data : Data output serial
c. Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.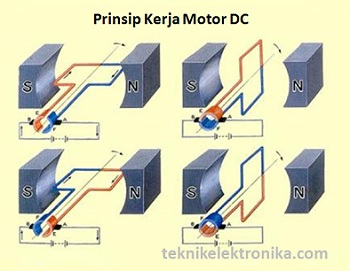 Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.

Uno berbeda dengan semua board sebelumnya dalam hal koneksi USB-to-serial yaitu meng-gunakan fitur Atmega8U2 yang diprogram sebagai konverter USB-to-serial berbeda dengan board sebelumnya yang menggunakan chip FTDI driver USB-to-serial.
Nama “Uno” berarti satu dalam bahasa Italia, untuk menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan menjadi versi referensi dari Arduino. Uno adalah yang terbaru dalam serangkaian board USB Arduino, dan sebagai model referensi untuk platform Arduino, untuk perbandingan dengan versi sebelumnya, lihat indeks board Arduino.
Daya
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal (otomatis). Eksternal (non-USB) daya dapat berasal baik dari AC-ke adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala dari baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor POWER.
Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai dengan 12 volt, jika diberi daya kurang dari 7 volt kemungkinan pin 5v Uno dapat beroperasi tetapi tidak stabil kemudian jikadiberi daya lebih dari 12V, regulator tegangan bisa panas dan dapat merusak board Uno.
Pin listrik adalah sebagai berikut:
- VIN. Tegangan masukan kepada board Arduino ketika itu menggunakan sumber daya eksternal (sebagai pengganti dari 5 volt koneksi USB atau sumber daya lainnya).
- 5V. Catu daya digunakan untuk daya mikrokontroler dan komponen lainnya.
- 3,3V. Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board.
- GND. Ground pin.
Memori
ATmega328 memiliki 32 KB (dengan 0,5 KB digunakan untuk bootloader), 2 KB dari SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis dengan EEPROM liberary).
Input dan Output
Masing-masing dari 14 pin digital di Uno dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dandigitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus:
- Serial : 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip Serial ATmega8U2 USB-to-TTL.
- Eksternal menyela : 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih lanjut.
- PWM : 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsianalogWrite ().
- SPI : 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan SPI library.
- LED : 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Uno memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
- I2C : A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan perpustakaan Wire.
- Aref : Tegangan referensi (0 sampai 5V saja) untuk input analog. Digunakan dengan fungsi analogReference ().
- Reset : Bawa baris ini LOW untuk me-reset mikrokontroler.


- IC akan merespon sinyal input 1 dan input 2 ketika pin Enable 1 diberi logika HIGH. Jika diberi logika Low maka Motor 1 tidak akan berputar.
- Ketika Input 1 dan input 2 diberikan input logika yang berbeda (Low dan high atau sebaliknya) maka motor akan berputar.
- Ketika Ketika Input 1 dan input 2 diberikan logika yang berlawanan maka motor akan berputar berlawanan arah dari sebelumnya.
- IC akan merespon sinyal input 3 dan input 4 ketika pin Enable 2 diberi logika HIGH. Jika diberi logika Low maka Motor 2 tidak akan berputar.
- Ketika Input 3 dan input 4 diberikan input logika yang berbeda (Low dan high atau sebaliknya) maka motor akan berputar.
- Ketika Ketika Input 3 dan input 4 diberikan logika yang berlawanan maka motor akan berputar berlawanan arah dari sebelumnya.
- Syarat motor motor berputar adalah logika input berlawanan. Jika logika input sama-sama High atau sama-sama Low maka Motor tidak akan berputar.
- Putaran motor searah jarum jam disebut Clock Wise (CW), sedangkan putaran motor yang berlawanan arah jarum jam disebut Counter Clock Wise (CCW).


Tidak ada komentar:
Posting Komentar